
Deployment of AGVs/AMRs and fleets
Can a single AGV/AMR meet the logistics and functional requirements of production and warehouse processes? The answer to this question depends mainly on the performance requirements of the processes being carried out. Not always, however, will a single robot be able to meet the functional requirements for the full automation of intralogistics system despite meeting the performance requirements. To fully answer the question posed, it is necessary to analyse a given process in terms of its requirements. In this regard, attention should be paid to the advanced simulation techniques which make it possible to accurately represent the process being carried out. Analyses of this type make it possible to decide whether it is enough to deploy an autonomous AGV/AMR or a fleet of AMRs with a master system with more extensive functionalities.
AGV/AMR as an autonomous logistics medium
Self-driving AGVs or AMRs are autonomous units which allow logistics carriers to be transported from defined logistics points. The robots manufactured by Etisoft Smart Solutions from the IntraBot family are an example. In the case of low complexity systems, the process can be carried out by the robot independently without the involvement of the master system. However, the lack of external management of this AGV causes such a configured system to be functionally limited. Full integration with the existing IT infrastructure of a production plant or warehouse is then hindered. This results in, for example, the lack of ability to execute intralogistics orders in a fully automatic manner and the inability to feed MES or WMS class systems with data from the intralogistics process. Nevertheless, a robot implemented in such way will make it possible to carry out basic transport functions in simple logistics processes.
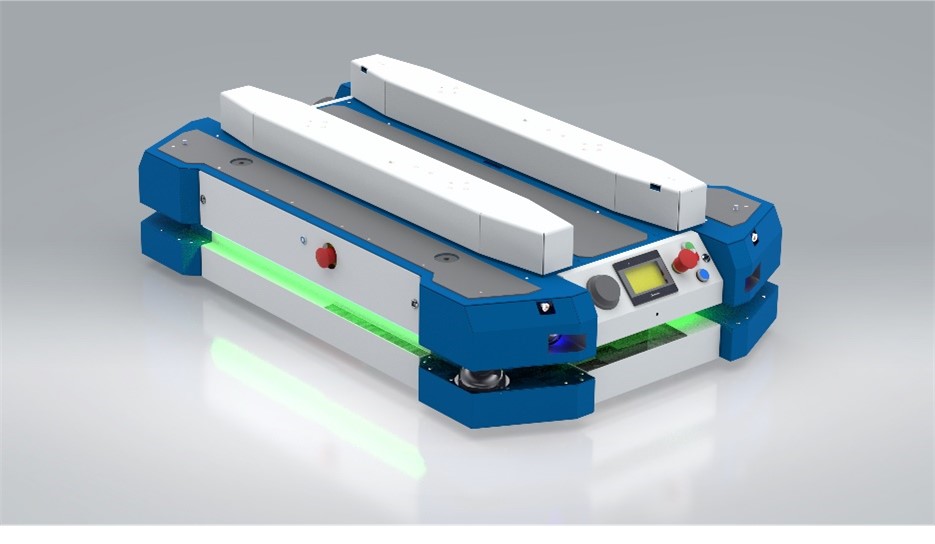
ESS Intrabot Lift 500 mobile robot
Fleet of AGVs/AMRs as an intralogistics system
In the case of complicated logistics processes with a simultaneous requirement for high system performance, the application of the fleet of AGVs/AMRs is indispensable. The robots deployed in such way create an intralogistics system which should be effectively managed. Appropriate software, which plays the role of the master system, is used for this purpose. An example is the original solution by Etisoft Smart Solutions called IntraFleet 4.0. Its basic functions are coordination of operation of mobile robots to efficiently implement the logic of intralogistics processes and management of their movement to eliminate collision situation and maximise the fluidity of the transport of logistics carriers. Thanks to cooperation with the existing infrastructure, it is possible to process data from the current production process to automatically trigger logistics orders for a fleet of AGVs/AMRs.

ESS IntraFleet 4.0 software
Process analysis and simulation
Process analysis is the basic element for determining the specification of the intralogistics system based on AGVs/AMRs. Advanced engineering tools make it possible to predict design risk by enabling the determination of key indicators such as system performance and return on investment. Thanks to virtualisation of the production plant or warehouse, it is also possible to plan the PoC (Proof of Concept) stage with a single robot so that it can be expanded in the future by a fleet of robots, while simultaneously being an integral part of the whole system. This stage makes it possible to verify the concept of the implementation of logistics tasks in a real production environment with the use of such target solutions as docks or mechanised roller conveyors.

Simulation of the intralogistics process in the FlexSim environment
While designing and deploying intralogistics systems based on mobile robotics, production process analysis is required based on which the specification of the intralogistics system can be determined. When undertaking the implementation of a single robot as an autonomous unit to carry out low complexity logistics tasks, it is worth analysing the subsequent possibilities of its expansion into an intralogistics system based on a fleet of AMRs. Otherwise, there is a risk of introduction of limitations that will make future development impossible. An example of such a situation can be the lack of a master system, which can severely hinder the scalability of the solution applied.
Interested? Contact us!
